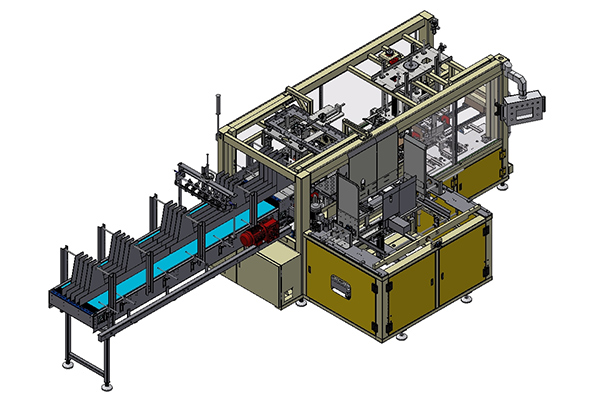
Linia do pakowania skrzynek współrzędnych serwo (z przegrodą tekturową)

Linia produkcyjna opakowań składa się z szybkiej dzielarki, linii transportującej produkty, linii transportującej chwytaki, Hbota, dwuwałowego mechanizmu przesuwu, linii transportującej pudełka, mechanizmu detekcji, chwytaka do przegródek tekturowych, systemu podawania przegródek tekturowych, serwomechanizmu, chwytaka do butelek oraz ogrodzenia ochronnego. Szybka dzielarka dzieli produkty na kilka ścieżek, a dwuwałowy mechanizm przesuwu przyspiesza ich przemieszczanie. Po dotarciu produktu do stanowiska przegródek tekturowych, robot Scar ładuje przegrodę tekturową do ułożonych produktów. Produkty docierają do przenośnika sortującego. Następnie produkty są pobierane przez chwytak i umieszczane w kartonie, a przenośnik kartonowy transportuje pudełko zawierające produkt na zewnątrz.
Kompletny układ systemu pakowania

Konfiguracja główna
| Ramię robota | ABB/KUKA/Fanuc |
| Silnik | SEW/Nord/ABB |
| Silnik serwo | Siemens/Panasonic |
| VFD | Danfoss |
| Czujnik fotoelektryczny | CHORY |
| Ekran dotykowy | Siemens |
| Aparatura niskiego napięcia | Schneider |
| Terminal | Feniks |
| Pneumatyczny | FESTO/SMC |
| Dysk ssący | PIAB |
| Łożysko | KF/NSK |
| Pompa próżniowa | PIAB |
| PLC | Siemens / Schneider |
| Interfejs użytkownika (HMI) | Siemens / Schneider |
| Płytka/łańcuch łańcuchowy | Intralox/rexnord/Regina |
Opis głównej struktury




Więcej programów wideo
- Pakowarka współrzędnych serwo do butelek szklanych z przegrodą tekturową